
There’s something about this COVD crisis that makes me want to dust off old projects, old hobbies and pick up where I left off. I wonder how we will look back on this in years to come. Will we think that the stay at home measures were excessive? or will we think that our actions saved society from unfathomable suffering. Will we have learned that for weeks we did not need the things that we thought our life was impossible without, will we care more for the people we were separated from, and the places we could not visit. I hope so, I hope something positive and permanent comes from something so devastating.
I think my desire to pull some old projects from cold storage comes from the reminder that not all that is gone is lost. Not all that you’ve moved on from has passed by. When I first put together my robot Jarvis, times were simpler, life was easier. There is a nostalgia from the time before I put in the box that I hope to release by opening it. Right now these little projects are helping to lift my mood, keep me challenged and help me feel like I have forward motion. Time to open the box. Deep breath…
Where to begin?
In the time since I built Jarvis I have learned so much. I have built things I am truly proud of. I hope some of them make blog posts one day in the future. I am not an engineer by trade, but I enjoy creating things from my own designs. I am often wrong, but I also often surprise myself with where I end up. My aim is never to make something that’s perfect, its to make something that’s a challenge for me.
So where should we begin? If I were a little robot that’s lived in dusty box for almost ten years, what would I want? I think I’d want to stretch my legs for starters..
Some design decisions then, to give Jarvis a good start:
- Wheels – Tracks are great, but they are noisy, expensive and complex. Jarvis needs to be fast on his feet, and agile. He has to shake the dust off. Legs are too expensive (Jarvis MK4?)
- Suspension – Jarvis needs to react to his terrain, he has to get up from a small knock or fall, no cracked plastic
- Higher ground clearance – no more beaching on small objects, lets give him some space underneath
- Modern Electronics – Arduino have changed the world in the last decade. It is now impossible to think about a microprocessor or motion control project without them. Jarvis development will be rapid using modern tools
- Strength – Jarvis needs some power and some strength. He needs a strong drive, and a strong back. I need a rigid chassis but with the capability to move.
I feel that’s a good set of objectives. Time to open Fusion 360.
A new design
Excited to get started, I roughed out a new design. I took inspiration from around the internet. 8 wheels, pivoting in pairs, and a body that can move. No suspension yet, but its an early start. With this body Jarvis can have ground clearance, can tackle many obstacles and should be able to carry some weight!
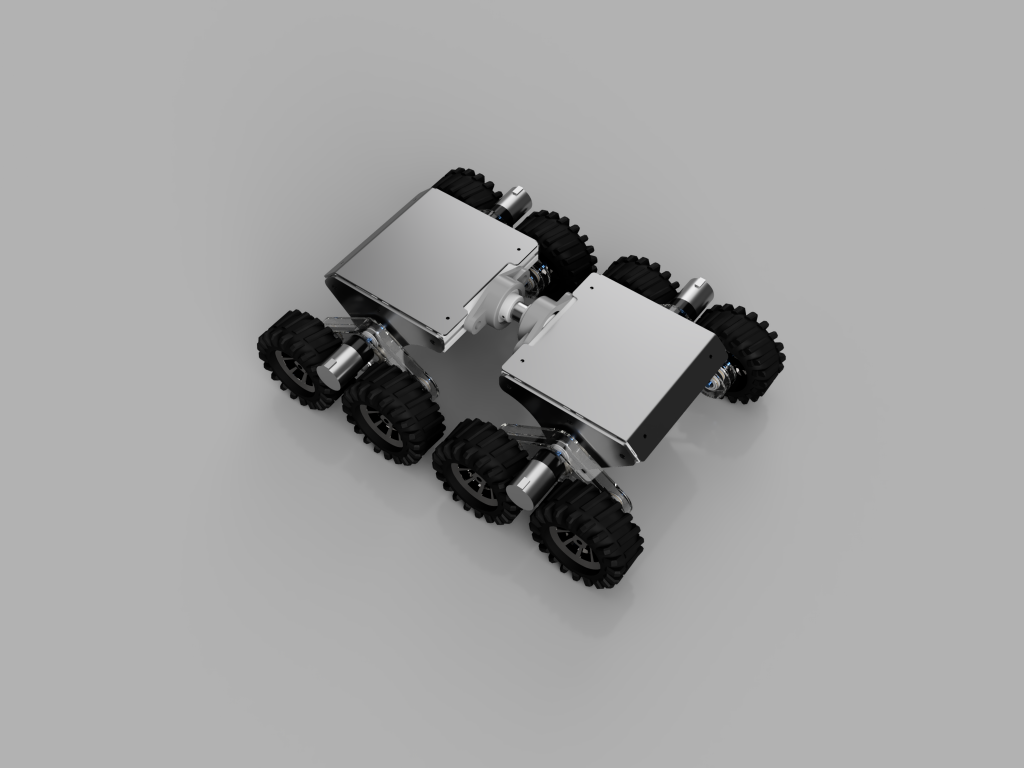
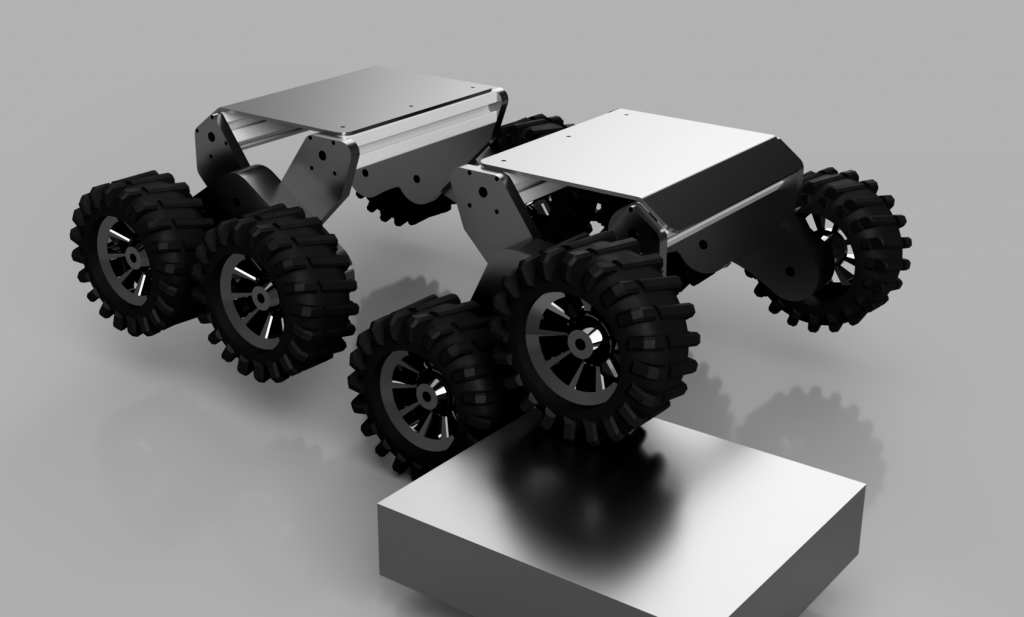

I think this is a great place to start. 4 motors to power the 8 wheels.
This is a great platform because If I can spare enough power I can even use stepper motors with trinamic drivers and measure how much current is needed to move the wheels and make an electronic traction control of sorts. I can also position angle sensors that allow me to understand the positioning of the drive sections (that power 2 wheels) and the main body. I am not sure at this point if I like the swivel in the middle, I wanted flexibility but this gives me many other design headaches around placing electronics, batteries, and even picking the darn thing up.
The whole scale is designed around standard (I learned from my research) 2.2″ RC Wheels. The tires are around 120mm wide so nice and large for getting around.
Things are starting to come together. anyway, that’s enough for tonight, next stop I need to order some wheels.